
Разлики между машини и роботи
Преди да преминем към темата свързана с използването на роботите в логистиката ще изясним накратко каква е разликата между тях и машините. Машините представляват механизирани решения, които са проектирани да извършват предварително дефинирани повтарящи се операции. Те започват да се използват още в средата на миналия век при появата на масовото производство и оформянето на поточните линии. В съвременните условия голяма част от машините се проектират да извършват набор от различни операции, но техният брой е ограничен и обикновено се налага пренастройка при преминаване от един режим към друг. За разлика от тях роботите притежават т.нар. интелект, което им помага да вземат решения в определен диапазон. Такива решения в логистиката могат да са: оптимизиране на траекторията на движение в склада, намиране на правилния продукт , предпазване на работещи в близост хора и др. Роботите за разлика от машините могат да изпълняват по-широк кръг от операции без да се налага да бъдат пренастройвани. Ето защо те могат да заменят хората при по-сложни и нестандартни операции.
Разлики между изкуствен и подобрен интелект ( Artificial Intelligence VS Augmented Intelligence).
Когато говорим за наличие на интелект при по-масово използваните роботи е важно да отбележим, че все още тук не става въпрос за „изкуствен интелект“, въпреки че някои производители широко спекулират с това понятие. Изкуственият интелект по дефиниция представлява софтуерен алгоритъм, който има способността да се самообучава и развива. Това означава, че при него се наблюдава възможност за адаптация към определени елементи на околната среда и вземане на редица автономни, много често трудно предвидими решения. В интернет могат да се намерят редица интересни статии, част от тях граничещи с „теория на конспирациите“ и сюжетни елементи близки до този от известния филм „Терминатор“, в които се правят предположения и догадки за това до къде са стигнали възможностите на изкуственият интелект. Това, което може да се твърди, е че разработчиците в тази област се стремят не само да създадат самообучаващи се системи, но по някакъв начин и да ограничат възможностите за вземане на неочаквани и подходящи според човешкия стандарт решения. Второто е не по-малко трудно от първото и в основата на това все още да има много скептици по отношение на ползите от създаването на изкуствен интелект. До където и да стигнало неговото развитие обаче със сигурност можем да твърдим, че той все още не се използва при производството на роботи за промишлена употреба.
За разлика от изкуственият интелект, подобрения интелект представлява набор от сложни алгоритми, чрез които се анализира голям набор от данни, които се превръщат в информация, която от своя страна се използва за последващи анализи с цел вземане на най-доброто решение. Опциите тук, въпреки че понякога могат да стигнат до няколко хиляди, все пак са ограничени като брой и могат в голяма степен да се предвидят. При най-добрите разработки от този клас, сценарии от типа „какво….ако…..“ са развити в техния най-голям потенциал. Някои алгоритми се оптимизират чрез индексиране на най-често доказалите се като добри решения, което увеличава тяхното бързодействие, но не и разнообразие. Все пак при тях липсва елемента на самообучение.
Типичен пример за подобрен интелект са най-съвременните софтуери за игра на шах. Те са снабдени с хиляди варианти за разиграване на една партия и в хода на играта избират най-добрия от тях в зависимост от ходовете на противника. Те обаче нямат правилен ход ако тайно им отнемете царицата. Какво ще направи в подобен случай изкуственият интелект все още можем само да гадаем. Например, би било добре тук да е изключена възможността да ни застреля заради това, че играем нечестно.
След като изяснихме разликите между изкуственият и подобреният интелект, можем да допълним определението за промишлени роботи и да кажем, че те представляват машини снабдени с подобрен интелект, който им дава възможност да променят своето поведение и функции в определени граници на база предварително дефинирани и очаквани промени в заобикалящата ги среда.
Според начина им на взаимодействие с хората можем да разделим роботите в две основни групи:
Изолирани роботи
Този тип роботи са добре познати на всички. Те започват да се използват в началото на нашия век и като цяло представляват подобрени варианти на машините. Диапазонът за вземане на самостоятелни решения е силно ограничен, поради което и тяхното поведение може да варира в тесни граници. Поради тези причини тази група роботи са проектирани да работят в изолирана среда и нямат пряко взаимодействие с хора.
Накратко ще представим някои от най-популярните решение, попадащи в тази група
Auto Store

Системата Auto Store доби широка популярност през последните години. Тя е типичен представител на системите от типа: продукти към хора, при които стоките необходими за комисиониране на клиентски поръчки се придвижват към стационарни станции, където самите поръчки се изпълняват от хората. Продуктите се съхраняват в контейнери подредени един върху друг. Самите роботи са ангажирани най-вече с извличане на стоките от локациите за съхранение и тяхното последващо придвижване към работните станции. При тази си дейност те следва да се съобразяват с редица условности и ограничения. На първо място трябва при извеждане на продукти, които се намират в дъното на „тунелите“ за съхранение, да се осигури временно място за съхранение на другите стоки, които се намират над търсения продукт, като едновременно с това да не се затруднява движението на другите роботи. След извличането на желания артикул следва обратно да наредят разместените продукти, като йерархията на поставяне е съобразена с тяхната обращаемост или остатъчен срок на годност. Тази система е подходяща най-вече за складове, където се обработват много, но малки по обем поръчки, каквито са фулфилмънт центровете например. Основно нейно предимство е, че значително се съкращава необходимата складова площ. Основен недостатък е, че понякога извеждането на даден продукт може да става твърде бавно, поради необходимост от много размествания. При подобни ситуации постигането на голяма скорост при изпълнението на поръчките е свързано с увеличаване на броя на роботите, което от своя срана води до увеличаване размера на необходимите инвестиции.
Комисиониране на редове от палет ( Layer picker)
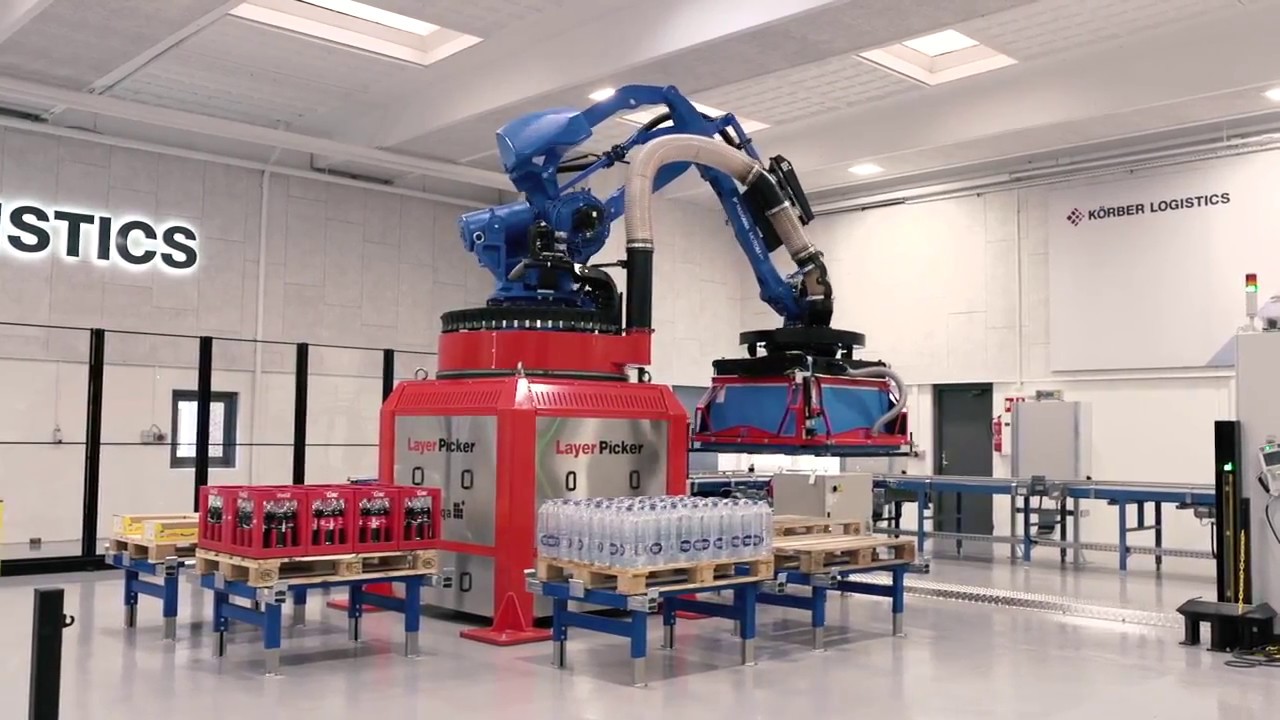
Това са роботи, които имат възможност за комисиониране на цели редове от палетизирана стока. Това е много полезна функция за дистрибуционни складове извършващи крос-док операции от типа „комисиониране по ред от поръчка“ ( pick by line). Основните функции на тези роботи са да преценят колко трябва да е силен захвата на продуктите, така че стоките да не се повредят и едновременно с това да не бъдат изпуснати ; кой продукт върху кой може да се стифира ; къде е необходимо поставянето на допълнителен междинен палет, колко трябва да е висок новият палет, за да е годен за транспортиране. Без анализирането на подобни решения този робот би се превърнал в обикновена машина, която се управлява от оператор. Едно от нaй-добрите решения тук е на компанията Riantics.
Автономно комисиониране

Системите за автономно комисиониране са съставени от съоръжения за автоматично настаняване и извеждане на стоки ( AS/RS ), сортировъчни конвейерни и роботи за пикиране на артикули. Те се управляват от централна система, която следи за цялостната синхронизация на всички елементи. Алгоритъмът за работа най-общо е следния: след постъпване на клиентска поръчка, необходимите артикули се извеждат от съоръженията за съхранение към статична работна станция. При самото извеждане се съобразяват сроковете на годност и партидността на стоките. По тази причина всеки артикул се съхранява в отделна клетка (контейнер) на ниво партида. Изведените стоки се насочват към отделните работни станции с помощта на сортираща система. При разпределението на поръчките се съобразява тяхната приоритетност и капацитета на всяка работна станция. Последната от своя страна се състои от робот, който чрез вакуум захваща и извежда необходимия брой артикули и ги поставя в друга предварително подготвена касетка. На една работна станция могат да се комисионират няколко поръчки едновременно. Предварително всички артикули се проверяват от сканиращи устройства, като освен потвърждение на тяхната идентичност се проверява и тяхното конкретно разположение в касетката, която се подава към робота. По този начин самият робот може да избере кой е най-удобния артикул, който може да се изведе от касетката. Системата може да работи напълно автономно и при непрекъсваем режим на работа, което съкращава значително периода на възвръщаемост на инвестицията. Най-често автономното комисиониране се използва във фармацевтичната индустрия и фулфилмънт центровете. Подобни решения предлагат компаниите Schafer и Dematic.
Кооперативни роботи (коботи)
Втората група роботи са кооперативните роботи, наричани още за краткост коботи (cobots). Те са предназначени за работа в непосредствена близост до хората без да бъдат изолирани. При тях наличието на подобрен интелект е от ключова важност не само с цел постигане на висока производителност, но и от съображения за сигурност и безопасност. По тази причина коботите трябва да се адаптират към променящата се външна среда. Възможно е често пъти да им се налага да вземат решения при нестандартно или неправилно поведения на хората около тях, като например: рязко преминаване на тяхната траектория на движение; промяна на локацията на артикулите ; липсващи артикули в дадена позиция и т.н.
И тук ще дадем примери за някои от доказалите се решения в практиката, без да претендираме за изчерпателност.
Автономно направлявани складови транспортни средства ( AGV)

Това може би е най-често срещаното приложение на коботи в практиката. То представлява стандартни машини за транспортиране на стоки, като например стакери; рич-траци, електрокари и др., на които допълнително се вграждат системи за автономно изпълнение на определени складови операции. Такива операции могат да са: настаняване на стоки след техния прием, вътрешни размествания на стока, комисиониране на цели палети, зареждане на стока в пикинг локации. В някои случаи подобни машини могат и сами да се включват в зоните за зареждане на батериите или да ги подменят със заредени такива. Въпреки, че използването на подобни машини на пръв поглед изглежда лесно, всъщност тяхната настройка е доста сложна и е свързана с предвиждането на редица ситуации. Например, възможно е в дадена локация, до която е изпратена машината да липсва стока или пък локацията, където трябва да се настани даден палет, да е вече заета от нерегистрирана в системата наличност. Следва да добавим и движението на хора в зоните, където машините могат да оперират. Ето защо използването на подобни машини е свързано със сложен процес на внедряване и настройка. Обикновено тяхното управление се извършва от централна информационна система, която комуникира с машините чрез радио вълни. Самите машини са снабдени с датчици за улавяне на движение и близко стоящи предмети, съоръжения и хора. Често пъти автономно направляваните машини се използват за работа в изолирана от хора среда и техните операции са свързани с придвижването на стоки по точно дефинирани маршрути. Това дава основание на някои автори да изключват това решение от групата на автономно придвижващи се роботи, като при подобна употреба това е абсолютно основателно.
Роботи за придвижване на стоки

Подобно на вече разгледаната система Auto Store и тук роботите се използват основно за придвижване на стоките към статични зони за комисиониране на поръчки. Разликата е, че тук роботите работят в пряко взаимодействие с хората. Тази система стана особено популярна, след като Амазон започна да я прилага в няколко свои склада. При нея роботите пренасят цели полични стелажни конструкции с тегло до 300 кг в зоните където се събират клиентски поръчки. Най-често за тяхното направление се използват индукция чрез монтирани в пода на склада проводници. Все пак роботите имат известна свобода да преценяват каква ще е точната им траектория. Имат и вградени системи за сигурност и защита на наблизо намиращи се хора.
Роботи за комисиониране на поръчки

Изпълнението на клиентски поръчки е най-важната складова логистична операция. Тя в най-голяма степен определя нивото на клиентско обслужване, което се предоставя от един склад, а освен това е и най-трудоемката дейност. Въпреки това имплементациите за автономно работещи роботи в тази област все още е твърде ограничено. Може би най-известното внедряване на подобни роботи е осъществено през 2017 година в склад на логистичната компания ITG, където се обработват спортни обувки на Puma. Компанията проектирала робота е Magazino, а софтуерът за управление е разработен от Gigaton. Неговото приложение на този етап е предимно в складове, където се съхраняват и обработват обувки, но създателите му твърдят, че може да се използва и в други индустрии. Роботът може да изпълнява паралелно няколко заявки ( групово пикиране) и да извежда стоките в зоната за експедиране. Съществено преимущество е, че не се изисква стоките да са задължително подредени по артикули, като е възможно кутии с различни видове обувки да се съхраняват една върху друга. Чрез специални механизми роботът може да извежда нужните стоки дори и върху тях да са подредени други. Това води до значително оптимизиране на необходимите складови площи за съхранение на стоки. Също така роботът разполага с широка гама алгоритми помагащи му да се ориентира в среда, където работят много на брой хора.
От направеният кратък обзор за възможностите за ползване на роботи в сферата на складовите дейности, можем да заключим, че все още това е област, в която има много добри намерения, но малко практически приложими решения включващи ползването на кооперативни роботи. Причините за това се крият предимно в голямото разнообразие на стоките, които се обработват в различните складове, както и понякога доста сложните операции, които се извършват в тях. По-често подобни иновации се въвеждат в складове обработващи много на брой, но малки по обем артикули с голям интензитет на клиентски поръчки, където има възможности за значително съкращаване на периода на възвръщаемост на инвестициите. За по-тежките и обемни стоки на този етап се разчита най-често на механизиране или автоматизиране на отделни трудоемки операции. Разбира се, напредъкът на технологиите е необратим процес и е само въпрос на време автономните роботи да навлязат по-широко в логистиката, така както вече това е факт в други области, като медицината, телекомуникациите и др.